
 产品:37
产品:37
 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室
----------------------------------------------------------------------------------------------------------
ABB机器人Event Routine设定
一、event routine 介绍
1、event routine 概念
当机器人进入某一事件时触发一个或多个设定的例行程序,这样的程序称为Event Routine,例如可以设定当机器人打开主电源开关时触发一个设定的例行程序。即当某个ABB机器人系统事件发生时候,可以触发关联的一个普通例行程序。
2、event routine组成要素
(1)event routine的系统触发事件
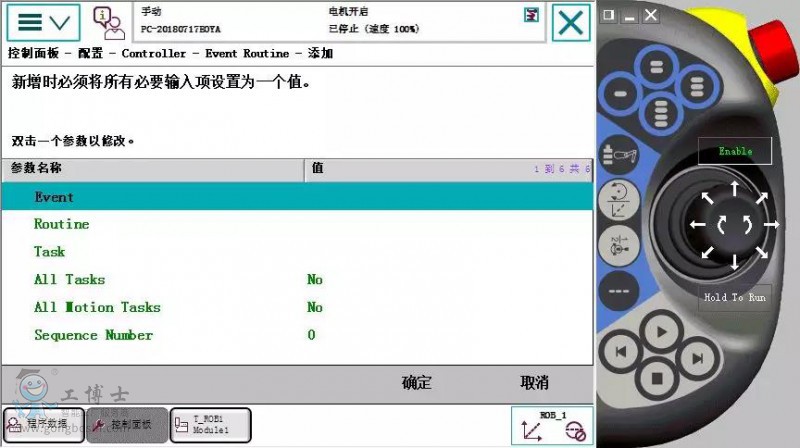
系统事件 说明 PowerOn 打开主电源,机器人电机上电 Start 程序启动 Stop 程序停止 Restart 系统启动 Qstop 快速停止 Restart 重启系统 Reset 错误复位 Step 步进 出发事件设定选项: 1)event routine当中的routine程序只可以时普通不带参数例行程序; 2)event routine当中的routine程序不可以是中断程序; 3)event routine当中的routine程序不可以是功能程序 4)event routine当中的routine程序不可以是带参数的例行程序; (2)event routine使用注意事项 1)可以被一个或多个任务触发,且任务之间无需互相等待,只要满足条件即可触发该程序。 2)如果是关联到Stop的EventRoutine,将会在重新按下示教器的启动按钮或调用启动I/O时被停止。要想从系统I/O取消一则已停止的事件例程, 的办法就是启动主例程的相关程序。 3)当关联到Stop的Event Routine在执行中发生问题时,再次按下停止按钮,系统将在10s后离开该EventRoutine。 4)可针对一项或多项任务来启动事件例程。正常执行任务时不会等候其它任务中的事件例程,因此若有任务依赖于其它任务中的事件例程,那么就应将这些任务进行同步,比如在正常执行任务前使用WaitSyncTask。 5)事件例程中的Stop指令(不含可选自变数-All)或Break指令都将停止程序的执行过程,这意味着位于Stop指令或Break指令之后的指令将永远不会执行。 二、event routine设定及其设定过程 1、设定各项说明 (1)路径:ABB菜单——>配置——>controller主题——>event routine——>添加,设定界面图片如下: (2)各项参数说明如下:
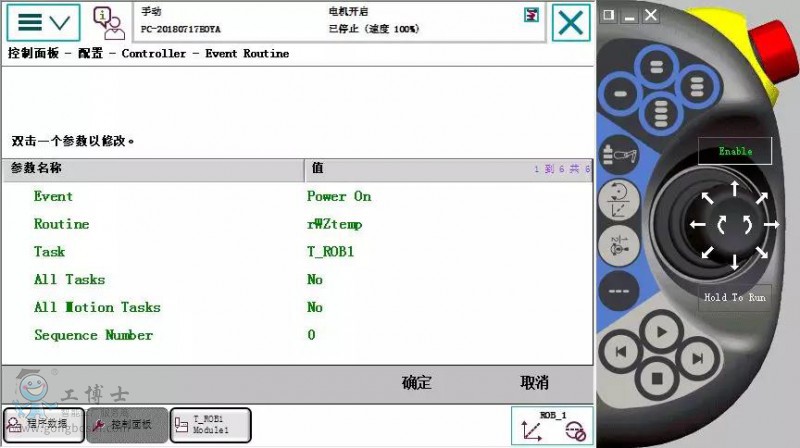
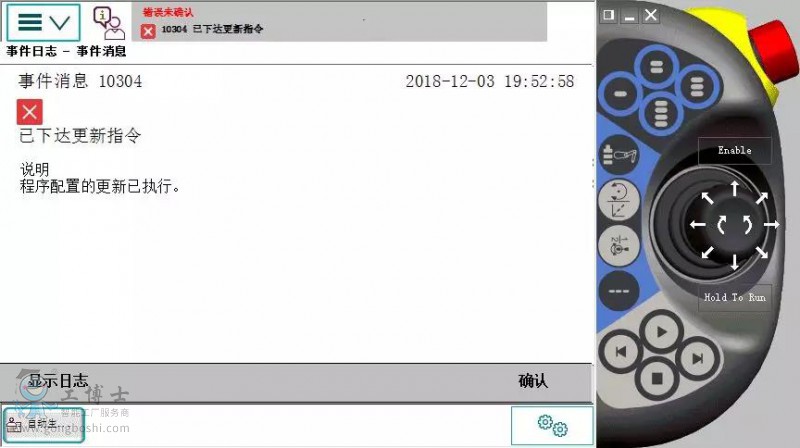
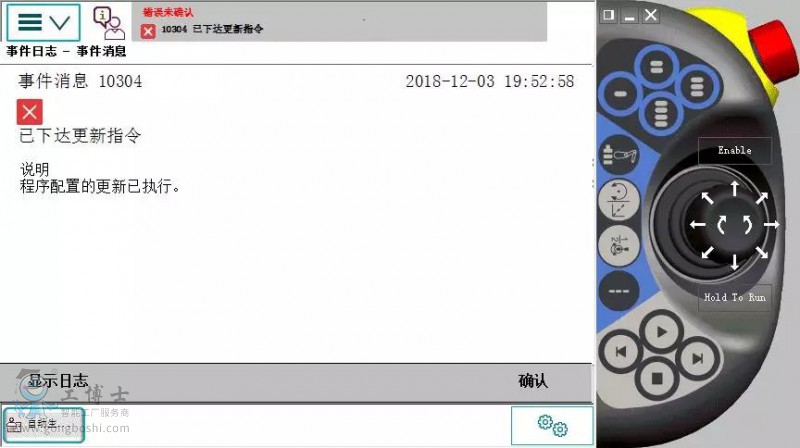
参数名称 参数说明 Event 机器人系统运行的系统事件,如启动停止等 Routine 需要关联的例行程序名称 Task 事件程序所在的任务 All Tasks 该事件程序是否在所有任务中执行,YES或NO All Motion Tasks 该事件程序是否在所有单元的所有任务中执行,YES或NO Sequence Number 程序执行的顺序号,0~100,0 先执行,默认值为0 2、设定步骤(1)在上面的设定界面进行设定,然后重启生效,例如下图设定: (2)重启之后生效画面 >三、举例使用 1、例行程序: 说明:系统事件event为PowerON,触发的routine例行程序如下: PROC rPowerON1() CONST pos posBOX2:=[991.635,146.938,1003.47]; CONST pos posBOX1:=[712.979,-269.706,684.876]; !posBOX1 :=CPos(\Tool:=Tregaskiss22deg\WObj:=wobj0); !posBOX2 :=CPos(\Tool:=Tregaskiss22deg\WObj:=wobj0); WZDOSet\Temp, wztempBOX1\Before, shapeBOX1, do1, 1; ENDPROC 2、event routine 设定 3、运行验证 (1)生效画面:
 (2)例行程序要求
(2)例行程序要求

- 下一篇:一文读懂ABB机器人通信功能
- 上一篇:ABB机器人数据类型的秘密