
 产品:37
产品:37
 联系我们
联系我们

ABB机器人输送链跟踪与视觉的联系
声明:本媒体部分图片、文章来源于网络,
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
1)现场输送链跟踪由于来料位置不确定,需要加视觉判断,然后ABB机器人跟踪,如下图
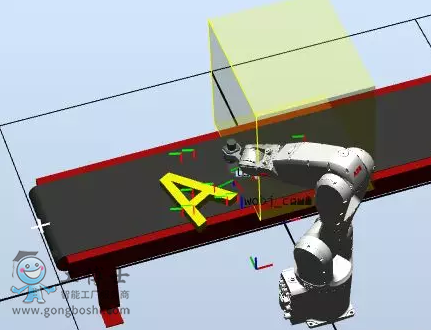
举例A是绕z轴旋转了30°,角度可以由相机拍摄获得
标准情况下A是正的
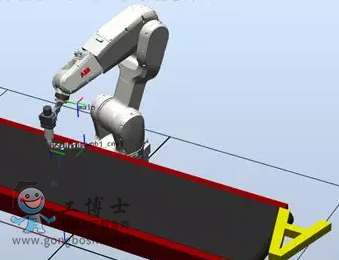
2)对于产品角度的调节,如下
3)建模tab下,找到产品
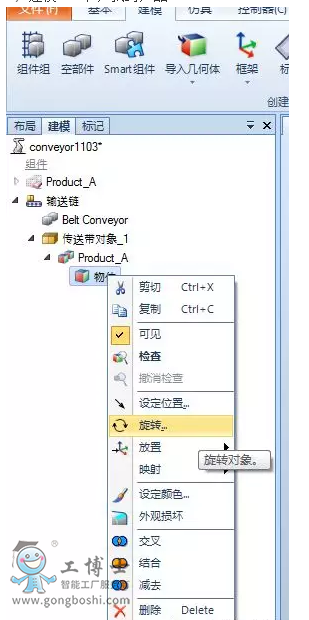
点击旋转,选择local坐标系,举例绕z旋转30度

5)先复制一份wobj_cnv1,生成wobj_cnv2
6)调整wobj_cnv1里的o
7)在waitwobj前加入坐标系调整
更多资讯:ABB机器人
- 下一篇:多领域的深入合作是ABB一直在寻求的
- 上一篇:ABB机器人编辑移动指令模板