
 产品:37
产品:37
 联系我们
联系我们

ABB机器人编程|程序数据的类型与分类
1.程序数据的类型分类 声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
ABB机器人的程序数据共有76个,并且可以根据实际情况进行程序数据的创建,为ABB机器人的程序设计带来了无限可能性。
在示教器的“程序数据”窗口可查看和创建所需要的程序数据。

(1)变量VAR
变量型数据在程序执行的过程中和停止时,会保持当前的值。但如果程序指针被移到主程序后,数值会丢失。
举例说明:
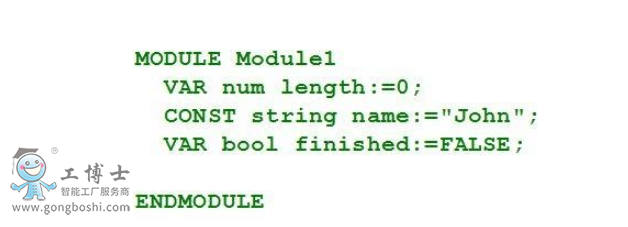
VAR num length:=0; 名称为length的数字数据
VAR stringname:="John";名称为name的字符数据VAR bool finish:=FALSE; 名称为finish的布尔量数据在程序编辑窗口中的显示如图:
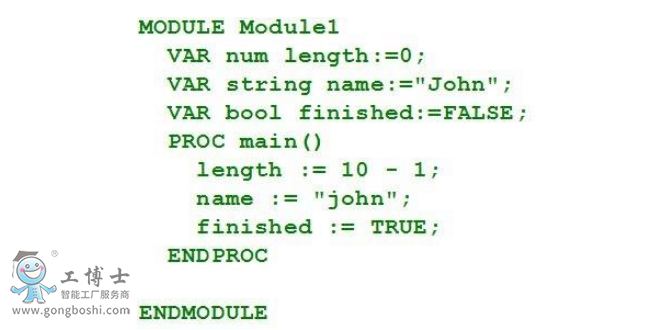
机器人执行的RAPID程序中也可以对变量存储类型程序数据进行赋值的操.作,如图:
*注意: VAR 表示存储类型为变量
num表示程序数据类型
*提示:在定义数据时,可以定义变量数据的初始值。如length的初始值为0,name的初始值为John,finish的初始值为FALSE。
*注意:在程序中执行变量型数据的赋值,在指针复位后将恢复为初始值。
(2) 可变量PERS可变量*大的特点是,无论程序的指针如何,都会保持*后赋予的值。举 例说明:
PERS numnbr:=1;名 称为nbr的数字数据
PERS stringtest:=" Hello";名称为test的字符数据
在机器人执行的RAPID程序中也可以对可变量存储类型程序数据进行赋值的操作。在程序执行以后, 赋值的结果会一- 直保持,直到对其进行重新赋值。
*注意:PERS表示存储类型为可变量
(3)常量CONST常量的特点是在定义时已赋予了数值,并不能在程序中进行修改,除非手动修改。举 例说明:
CONST numgravity:=9.81; 名称为gravity的数字数据
CONST stringgreating:=" Hello";名称为greating的字符数据
*注意:存储类型为常量的程序数据,不允许在程序中进行赋值的操作。三种数据的存储类型在编辑界面的显示如下:
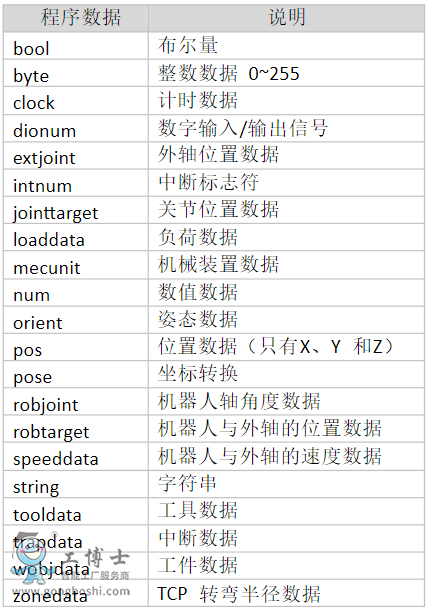
3.常用的程序数据
根据不同的数据用途,定义了不同的程序数据,下 表是机器人系统中常用的程序数据:
更多资讯:ABB机器人