
 产品:37
产品:37
 联系我们
联系我们

ABB机器人自主钻探机器人全球首演!!!
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
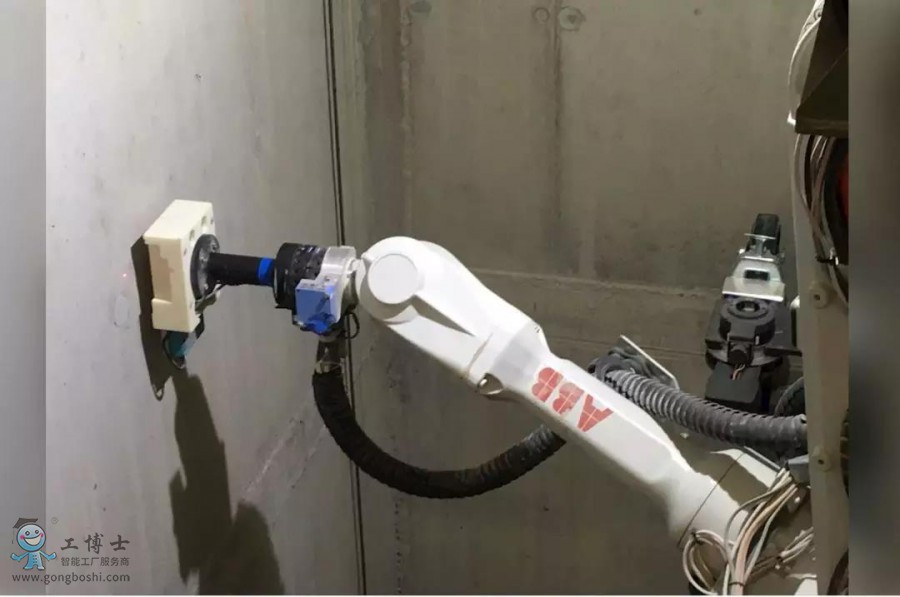
全球电梯和自动扶梯提供商之一的迅达(Schindler)已启动了一项试点项目,该项目具有自动,独立操作的电梯机器人安装系统。该公司选择了ABB制造的工业机器人进行这一创新的全球首演。

电梯安装需要在电梯井道中使用地脚螺栓,以安全地固定导轨和检修门-许多地脚螺栓。建筑物越高,数量越多。
“在混凝土电梯井中钻孔以安装锚固是一项艰巨,重复和费力的工作。高精度和全神贯注对于安全至关重要。” “在高层建筑中安装升降机需要数百个地脚螺栓孔。井筒嘈杂,多尘,工作繁重。”
迅达开发了一种自动化的机器人辅助安装系统,称为“电梯机器人安装系统”,以提高质量并简化电梯安装人员的工作条件。迅达与瑞士苏黎世科技大学和瑞士ABB机器人技术公司的软件专家合作启动了该试点项目。
机器人的主要任务是在电梯井中钻孔并安装地脚螺栓。但是,机器人的功能远不止于此。该开发包括一个自动安装系统,该系统通过自动葫芦在地板之间独立移动,这是以前从未做过的事情。“另外的设计挑战是,我们很难对机器人进行编程,以使其无法在毫米精度的相同坐标上连续钻孔。机器在电梯井筒中的位置到处移动,并且必须连续且动态地适应钻孔坐标,” Studer解释说。

寻找合适的机器人给项目团队带来了进一步的挑战。他们*终选择了ABB IRB2600。“它的工作距离为1.65米,有效载荷为29公斤,非常适合这项任务。此外,众所周知,ABB强大的工业机器人在恶劣的环境中也能可靠地运行,这对于降低成本尤为重要。该应用程序。” Studer说。
工业机器人通常安装在工厂的地基上,并参照其空间零位置执行其程序。对于“电梯机器人安装系统”原型,IRB 2600安装在平台上,临时提升机在升降机井道中上下移动。
“在这个三维空间中,机器人无法将每个钻孔位置重置为新的零位置,因此我们必须在某种程度上胜过控制器,以确保每次将机器人手臂定位在孔坐标处,” Studer说。
Studer解释说:“尽管在平台上安装了摄像头,可以进行远程查看,并且记录了与钻孔有关的所有数据,但是该系统是自动运行的。不需要操作员来监视和控制它。” 因此,它可以简单地安装在电梯井道中,在那里它可以全天候独立运行,直到安装了所有地脚螺栓。
该原型机已在欧洲的几种新型电梯系统中获得成功。Christian Studer补充说:“ IRB 2600在此过程中从未失败过,这说明它的坚固程度。”
在2019年4月的高层建筑与城市创新会议上,高层建筑与城市人居环境委员会凭借其``电梯机器人安装系统''向迅达颁发了创新类卓越奖。迅达的计划要求增加使用这些自动系统,这些系统都配备了ABB的IRB 2600。
“自动化是建筑行业中讨论*多的话题,” Studer说。“由于电梯井道的几何结构简单明了,电梯井可用于数字化建设。这种自主系统使我们能够直接将数字化带到施工现场。这要归功于*新的传感器开发和人工智能,我们得以成功实施了这一全球首发,他总结说。
迅达股份公司总部位于埃比孔,是迅达控股公司的子公司。该公司成立于1874年,目前在全球拥有65,000名员工。迅达是电梯和自动扶梯以及相关服务的全球**提供商之一。其移动解决方案每天在全球移动超过10亿人。
更多资讯:ABB机器人
- 下一篇:ABB机器人运行指令如何切割小圆
- 上一篇:ABB机器人的视觉通讯能发挥哪些优势