
 产品:37
产品:37
 联系我们
联系我们

ABB机器人基础编程
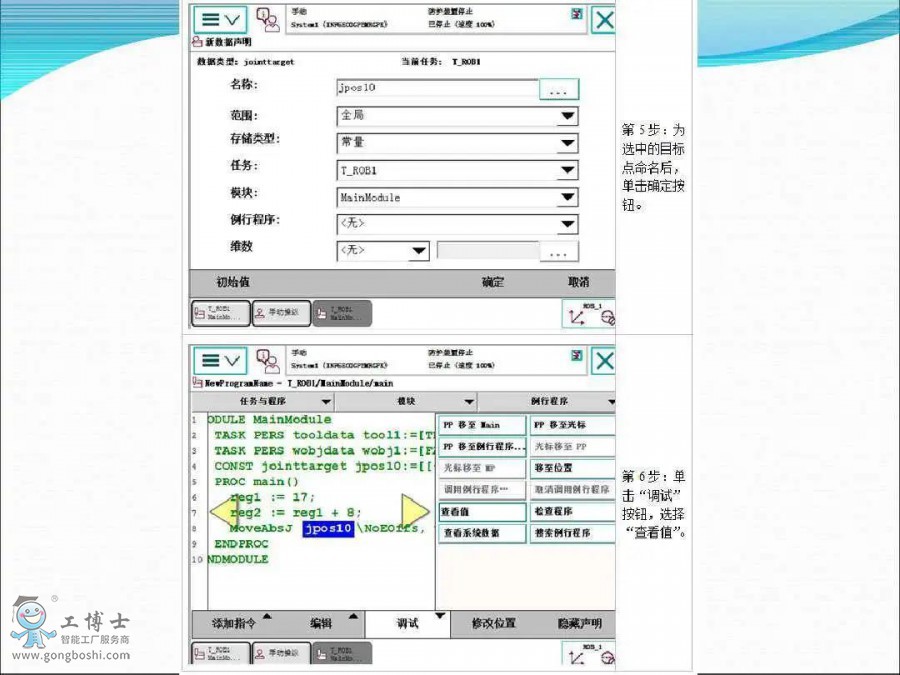
工业机器人在空间中常用运动指令主要有关节运动(MoveJ)、线性运动(MoveL)、圆弧运动(MoveC)和**位置运动(MoveAbsJ)四种方式。
1.**位置运动指令
**位置运动指令是机器人运动使用六个轴和外轴的角度值来定义目标位置数据。
操作如下:


关节运动指令:
关节运动指令是指对路径精度要求不高的情况下,工业机器人的工具中心点TcP从一个位置移动到另一个位置,两个位置间的路径不一定是直线。
直线运动指令:
MoveL运动特点是,起点到目标点间保持为直线运动,常用于焊接、涂胶作业。
指令示例:MoveL,p20,v100,fine,tool0;
执行上述指令,机器人运动轨迹如下图所示。机器人TCP以直线运动到达目标点p20时速度降为零,使用的工具是tool0。
机器人直线运行轨迹
圆弧运动指令:MoveC
指令示例:MoveL p40,v200,z50,tool0;
MoveC p50,p60,v200,fine,tool0;
机器人TCP从前一位置以直线运动到达圆弧起始点,接着从起始点P40到终点P60做圆弧运动,运行速度为200MM/S,转弯半径是fine,使用的工具是tool0.如下图所示:
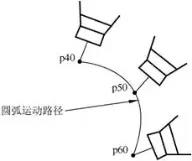
机器人圆弧运动轨迹
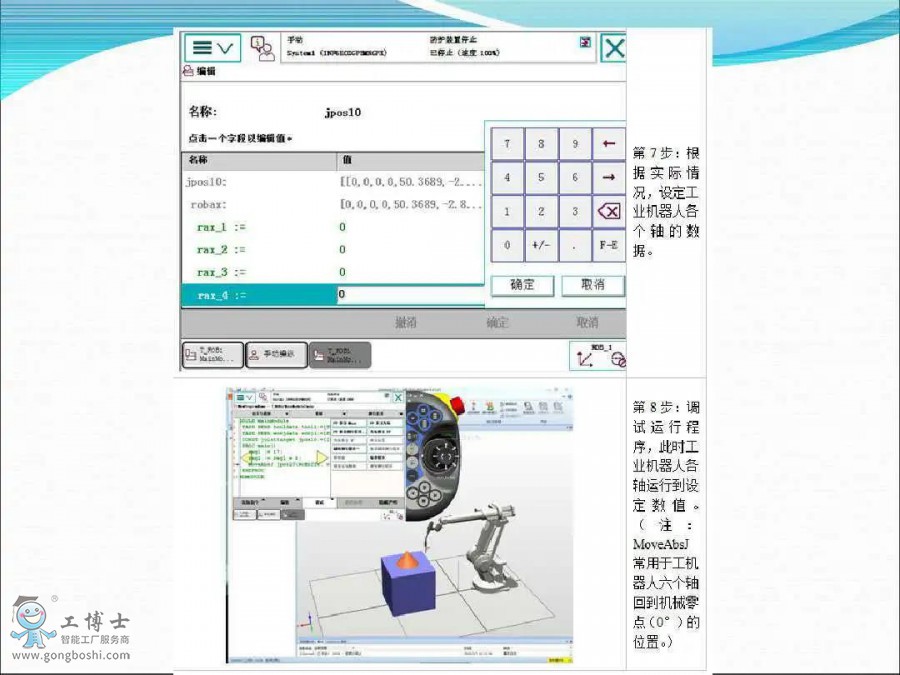
**位置运动指令:MoveAbsJ
运动特点是:机器人运行至各关节轴零点位置。
指令示例:MoveAbsJ p50,v1000,z50,tool0;
机器人将携带工具tool0沿着一个非线性路径到**轴位置p50为关节目标点,各关节轴为零度。
更多资讯:ABB机器人
- 下一篇:上位机直接移动ABB机器人
- 上一篇:ABB机器人的程序结构与模块属性