
 产品:37
产品:37
 联系我们
联系我们

ABB机器人如何与变位机协调焊接?
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
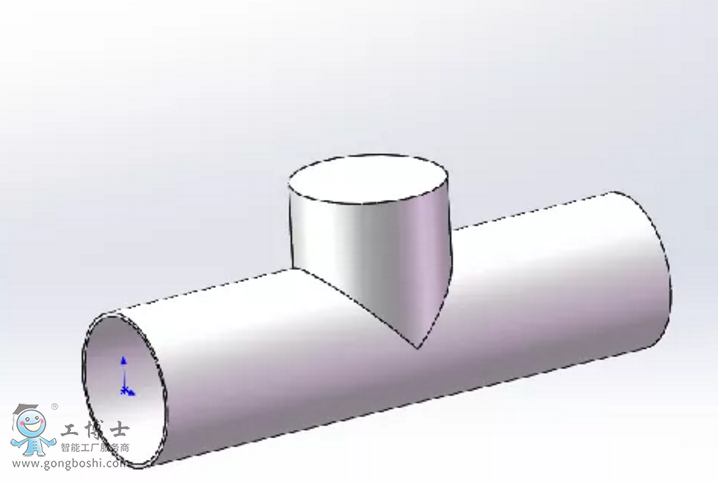
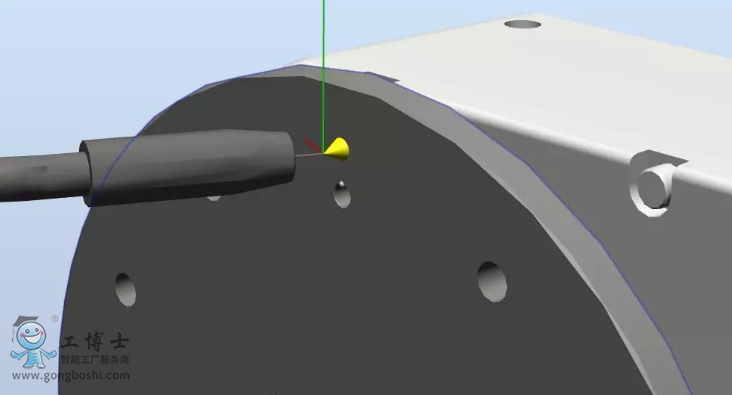
对于某些特殊的工件,例如相贯线型的焊缝,不同心的圆管,机器人如何与变为及进行协调焊接?
如果机器人与变位机处于半联动状态,那么焊接过程中,工件旋转到一定角度后,与焊枪的姿态将不支持焊接继续。必须熄弧,再将工件旋转到某一定角度后才能继续焊接。
而与机器人处于协调状态的变位机,则完全优化了这一现象。
好了废话不多说,我们直奔主题:
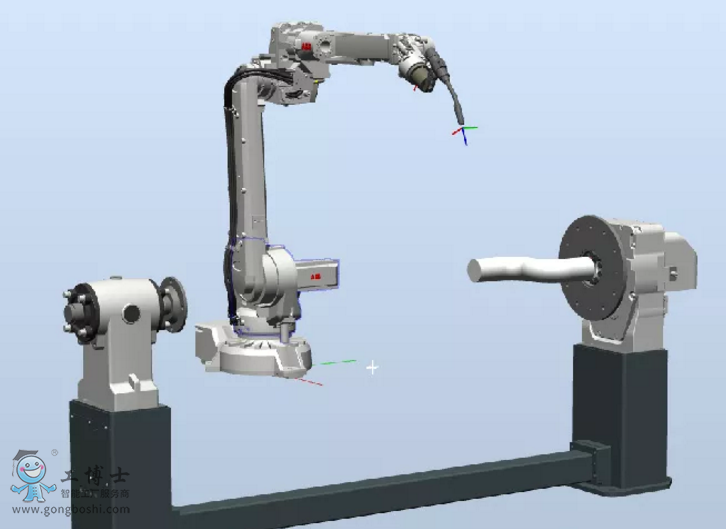
1、导入机器人系统和零件,机器人除了焊接要使用的弧焊包,无需添加其他选项。
更多资讯:ABB机器人
- 下一篇:ABB机器人如何建立工具
- 上一篇:ABB机器人控制柜各个部件及作用介绍